
カメラのオートフォーカスシステムは、被写体にピントを合わせるためにカメラのレンズを賢く調整するもので、シャープな写真とシャッターチャンスを逃すことのない違いがあります。 ピントを合わせるという一見シンプルな目標にもかかわらず、カメラのピント合わせの内部構造は、残念ながらそれほど単純ではありません。 このチュートリアルでは、オートフォーカスの仕組みを紹介することで、オートフォーカスの長所を生かし、短所を避けて、よりよい写真を撮ることを目指します。 パッシブAFにはコントラスト検出方式と位相差検出方式がありますが、どちらもコントラストを利用してAFを行うため、このチュートリアルでは定性的には同じものとして扱います。 特に断りのない限り、このチュートリアルではパッシブオートフォーカスを想定しています。 また、アクティブAFのAFアシストビーム方式については、最後の方で説明します。
- CONCEPT: オートフォーカスセンサー
- オートフォーカスの性能に影響を与える要因
- NUMBER &TYPE OF AUTOFOCUS POINTS
- AF MODE: カメラのフォーカスモードで最も広くサポートされているのは、静止画に適したワンショットフォーカスモードです。 しかし、高速で移動する被写体に対しては、被写体の動きを予測できないため、フォーカスエラーが発生しやすく、また、ファインダー内で移動する被写体を視認しにくい可能性があります。 3435> 多くのカメラでは、動く被写体に対してピントの合う距離を調整し続けるオートフォーカスモードもサポートしています。 キヤノン製では「AIサーボ」、ニコン製では「コンティニュアス」と呼んでいます。 これは、過去のフォーカス距離から推定される被写体の速度から、被写体が将来どこに来るかを予測することで動作します。 そして、シャッタータイムラグ(シャッターボタンを押してから露光が始まるまでの遅れ)を考慮して、あらかじめ予測した距離でピントを合わせます。 3435> 以下に、キヤノンの各種カメラにおける最大トラッキング速度の例を示します。 値は理想的なコントラストと照明で、キヤノン 300mm F2.8 IS Lレンズを使用。 実際の最高追従速度は、被写体の不規則な動き、被写体のコントラストや照明、レンズの種類、追従に使用するオートフォーカスセンサーの数などによって異なります。 AUTOFOCUS ASSIST BEAM
- IN PRACTICE: ACTION PHOTOS
CONCEPT: オートフォーカスセンサー
カメラのオートフォーカスセンサーは、正確なピント合わせを行うための真のエンジンであり、画像の視野全体にさまざまな配列で配置されています。 各センサーは、画像内のそれぞれのポイントにおけるコントラストの変化を評価することにより、相対的なフォーカスを測定します。

| Change Focus Amount.(フォーカス量変更)。 | ||
| ぼかし | 部分的 | シャープ |
| 400% |
 Sensor Histogram |
画像のコントラストに関する背景は、画像ヒストグラムのチュートリアルをご覧ください。
注意:コンパクトデジタルカメラの多くは、イメージセンサーそのものをコントラストセンサーとして使用しており(コントラスト検出AFという方式)、必ずしも複数の個別のAFセンサーを持っているわけではありません(位相差AFという方式が一般的です)。 さらに、上図はコントラスト検出方式のAFを示したもので、位相差検出方式もありますが、これもコントラストに依存した正確なオートフォーカスが可能です。
オートフォーカスのプロセスは、一般に次のように動作します:
(1)オートフォーカスプロセッサ(AFP)が焦点距離をわずかに変化させる。
(2) AFPがAFセンサーを読み取り、どのくらいピントが合ったかを判断する。
(3) (2)の情報をもとに、AFPがレンズを新しい焦点距離に合わせる。 難しい被写体では、ピントが合わず、上記の動作を繰り返して、AFに失敗することがあります。 これがフォーカスハンチングと呼ばれるもので、ピントが合わず何度も往復することになります。 ただし、これは選んだ被写体にピントが合わないということではありません。 オートフォーカスがうまくいかないかどうかは、主に次のような要因で決まります。
オートフォーカスの性能に影響を与える要因
オートフォーカスの性能は、カメラの機種やレンズ、フォーカス設定の違い以上に、被写体が大きな影響を与えることがよくあります。 オートフォーカスに影響を与える最も重要な3つの要因は、光量、被写体のコントラスト、カメラや被写体の動きです。

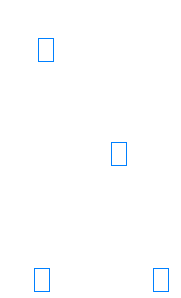
左の図は、異なるフォーカスポイントの品質を示す例です。
これらの要素はそれぞれ独立しているわけではなく、薄暗い被写体でもコントラストが強ければオートフォーカスができる場合もありますし、その逆もあります。 左の例では、幸いにもオートフォーカスの効きやすい場所が被写体の位置と一致していました。 次の例は、被写体ではなく、背景に対してオートフォーカスが最もよく効くので、より問題があります。

右の写真では、被写体の後ろの高速で動く光源に焦点を合わせると、(このような低照度のアクションショットのように)被写界深度が浅い場合にピンボケになる危険性があります。
あるいは、被写体の外側のハイライトにピントを合わせるという方法もありますが、このハイライトは移動する光源の位置によって左右や強さが急激に変わるという注意点があります。
カメラが外部のハイライトに焦点を合わせるのが難しい場合、より低いコントラスト(しかし静止しており、適度に明るい)のフォーカスポイントは、被写体の足か、被写体と同じ距離の地面にある葉っぱになります。
NUMBER &TYPE OF AUTOFOCUS POINTS
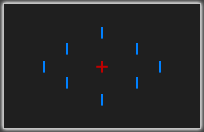
オートフォーカスの堅牢性と柔軟性は、主に与えられたカメラモデルによって利用可能になったオートフォーカス点の数、位置および種類の結果である。 ハイエンドの一眼レフカメラでは45点以上、それ以外のカメラでは中央1点程度のAFしかありません。 オートフォーカスセンサーのレイアウト例を2つご紹介します。0
| 最大f/#: | f/2.8 | f/4.0 | f/5.0 | f/5.6 |
|
 |
|||
| Entry to Midrange SLR | ||||
左と右に使用するカメラはそれぞれCanon 1D MkⅡとCanon 20Dです。
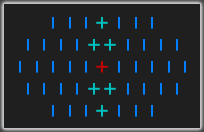
2種類のオートフォーカスセンサーを紹介します。
+クロス型センサー(2次元コントラスト検出、高精度)
lバーティカルラインセンサー(1次元コントラスト検出、低精度)
注)バーティカルラインセンサーとは、垂直線に沿ってコントラスト検出することからそう呼ばれているだけです。
皮肉なことに、このタイプのセンサーは横線を検出するのが得意なのです。
一眼レフの場合、上の図のように、使用するレンズの開放F値によってもAFポイントの数や精度が変わってきます。 このことは、カメラのレンズを選ぶ際に重要なことで、レンズを開放で使用する予定がなくても、この絞りによってピント精度が向上することがあります。 さらに、中央のAFセンサーはほとんどの場合最も正確なので、中心から外れた被写体には、まずこのセンサーを使ってフォーカスロックをするのがベストです(フレームを再合成する前に)
複数のAFポイントは、カメラの設定によって、一緒に動作して信頼性を高めることも、単独で動作して特異性を高めることも可能です。 また、一部のカメラでは、集合写真のための「被写界深度自動調整」機能を備えており、フォーカスポイントのクラスタがすべて許容範囲内に収まるようにします
AF MODE:
 カメラのフォーカスモードで最も広くサポートされているのは、静止画に適したワンショットフォーカスモードです。 しかし、高速で移動する被写体に対しては、被写体の動きを予測できないため、フォーカスエラーが発生しやすく、また、ファインダー内で移動する被写体を視認しにくい可能性があります。 3435>
カメラのフォーカスモードで最も広くサポートされているのは、静止画に適したワンショットフォーカスモードです。 しかし、高速で移動する被写体に対しては、被写体の動きを予測できないため、フォーカスエラーが発生しやすく、また、ファインダー内で移動する被写体を視認しにくい可能性があります。 3435>
多くのカメラでは、動く被写体に対してピントの合う距離を調整し続けるオートフォーカスモードもサポートしています。 キヤノン製では「AIサーボ」、ニコン製では「コンティニュアス」と呼んでいます。 これは、過去のフォーカス距離から推定される被写体の速度から、被写体が将来どこに来るかを予測することで動作します。 そして、シャッタータイムラグ(シャッターボタンを押してから露光が始まるまでの遅れ)を考慮して、あらかじめ予測した距離でピントを合わせます。 3435>
以下に、キヤノンの各種カメラにおける最大トラッキング速度の例を示します。
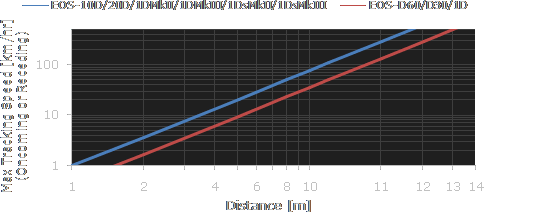
値は理想的なコントラストと照明で、キヤノン 300mm F2.8 IS Lレンズを使用。 実際の最高追従速度は、被写体の不規則な動き、被写体のコントラストや照明、レンズの種類、追従に使用するオートフォーカスセンサーの数などによって異なります。
AUTOFOCUS ASSIST BEAM
多くのカメラに搭載されているAFアシストビームは、可視光や赤外線を照射してAFセンサーが被写体を検出しやすくするアクティブAFの手法です。 コンパクトカメラでは、AFアシストに内蔵の赤外線光源を使用するものが多いですが、デジタル一眼レフカメラでは、内蔵または外付けのフラッシュで被写体を照らすものが多くなっています。 AFアシストにフラッシュを使用した場合、フラッシュの発光と発光の間に被写体が大きく動くと、AFアシストがうまく作動せず、フォーカスロックができないことがあります。
IN PRACTICE: ACTION PHOTOS
AIサーボやコンティニュアスモードを使用したアクションフォトでは、ほとんどの場合、オートフォーカスが最も良好に動作します。

おそらく最も一般的に支持されている方法は、動く被写体が通過すると思われる距離で、あらかじめピントを合わせておくことでしょう。 右のバイカーの例では、バイカーがその距離の近くを通ると予想されるので、道路の側面の近くでプリフォーカスすることができます。
一眼レフのレンズには、最短撮影距離スイッチがあり、これをできるだけ遠くに設定する(被写体が決して近づかないと仮定する)こともパフォーマンスを改善できます。
ただし、コンティニュアスオートフォーカスモードでは、フォーカスロックがされていなくても撮影は可能ですので、ご注意ください。
ポートレートでは、定番であることと、コントラストが良いことから、目が最も良いフォーカスポイントになります。 通常、中央のオートフォーカスセンサーが最も感度が良いのですが、中心から外れた被写体には、中心から外れたフォーカスポイントを使用するのが最も正確なピント合わせになります。 中央のAFセンサーでフォーカスロックすると、被写体との距離がずれてしまい、近い被写体ほどその誤差は大きくなります。

最も一般的なAFセンサーは縦位置センサーなので、フォーカスポイントが縦と横のどちらのコントラストが強いかも考慮するとよいでしょう。 左の例では、階段は主に水平方向の線で構成されています。 もし手前の階段の奥にピントを合わせるとしたら(超焦点距離を使って見かけ上の被写界深度を最大にするため)、まずオートフォーカス中にカメラを横向きにすることで、オートフォーカスの失敗を避けることができます。 その後、必要であれば、露光中にカメラを縦向きに回転させることができます。
このチュートリアルでは、必ずしもどこにピントを合わせるかではなく、どのようにピントを合わせるかに重点を置いていることに注意してください。 このトピックに関する詳細については、被写界深度と超焦点距離のチュートリアルを参照してください。
多くのカメラでは、動く被写体に対してピントの合う距離を調整し続けるオートフォーカスモードもサポートしています。 キヤノン製では「AIサーボ」、ニコン製では「コンティニュアス」と呼んでいます。 これは、過去のフォーカス距離から推定される被写体の速度から、被写体が将来どこに来るかを予測することで動作します。 そして、シャッタータイムラグ(シャッターボタンを押してから露光が始まるまでの遅れ)を考慮して、あらかじめ予測した距離でピントを合わせます。 3435>
以下に、キヤノンの各種カメラにおける最大トラッキング速度の例を示します。
値は理想的なコントラストと照明で、キヤノン 300mm F2.8 IS Lレンズを使用。 実際の最高追従速度は、被写体の不規則な動き、被写体のコントラストや照明、レンズの種類、追従に使用するオートフォーカスセンサーの数などによって異なります。
AUTOFOCUS ASSIST BEAM
多くのカメラに搭載されているAFアシストビームは、可視光や赤外線を照射してAFセンサーが被写体を検出しやすくするアクティブAFの手法です。 コンパクトカメラでは、AFアシストに内蔵の赤外線光源を使用するものが多いですが、デジタル一眼レフカメラでは、内蔵または外付けのフラッシュで被写体を照らすものが多くなっています。 AFアシストにフラッシュを使用した場合、フラッシュの発光と発光の間に被写体が大きく動くと、AFアシストがうまく作動せず、フォーカスロックができないことがあります。
IN PRACTICE: ACTION PHOTOS
AIサーボやコンティニュアスモードを使用したアクションフォトでは、ほとんどの場合、オートフォーカスが最も良好に動作します。
おそらく最も一般的に支持されている方法は、動く被写体が通過すると思われる距離で、あらかじめピントを合わせておくことでしょう。 右のバイカーの例では、バイカーがその距離の近くを通ると予想されるので、道路の側面の近くでプリフォーカスすることができます。
一眼レフのレンズには、最短撮影距離スイッチがあり、これをできるだけ遠くに設定する(被写体が決して近づかないと仮定する)こともパフォーマンスを改善できます。
ただし、コンティニュアスオートフォーカスモードでは、フォーカスロックがされていなくても撮影は可能ですので、ご注意ください。
ポートレートでは、定番であることと、コントラストが良いことから、目が最も良いフォーカスポイントになります。 通常、中央のオートフォーカスセンサーが最も感度が良いのですが、中心から外れた被写体には、中心から外れたフォーカスポイントを使用するのが最も正確なピント合わせになります。 中央のAFセンサーでフォーカスロックすると、被写体との距離がずれてしまい、近い被写体ほどその誤差は大きくなります。
最も一般的なAFセンサーは縦位置センサーなので、フォーカスポイントが縦と横のどちらのコントラストが強いかも考慮するとよいでしょう。 左の例では、階段は主に水平方向の線で構成されています。 もし手前の階段の奥にピントを合わせるとしたら(超焦点距離を使って見かけ上の被写界深度を最大にするため)、まずオートフォーカス中にカメラを横向きにすることで、オートフォーカスの失敗を避けることができます。 その後、必要であれば、露光中にカメラを縦向きに回転させることができます。
このチュートリアルでは、必ずしもどこにピントを合わせるかではなく、どのようにピントを合わせるかに重点を置いていることに注意してください。 このトピックに関する詳細については、被写界深度と超焦点距離のチュートリアルを参照してください。