
Les moteurs sont des machines qui convertissent une source d’énergie en travail physique. Si vous avez besoin de quelque chose pour vous déplacer, un moteur est juste la chose à claquer dessus. Mais tous les moteurs ne sont pas fabriqués de la même façon, et les différents types de moteurs ne fonctionnent définitivement pas de la même façon.

La façon la plus intuitive de les différencier est probablement le type d’énergie que chaque moteur utilise pour sa puissance.
- Moteurs thermiques
- Moteurs à combustion interne (moteurs IC)
- Moteurs à combustion externe (moteurs EC)
- Moteurs à réaction. moteurs
- Moteurs électriques
- Moteurs physiques
Moteurs thermiques
Dans la définition la plus large possible, ces moteurs nécessitent une source de chaleur à convertir en mouvement. Selon la façon dont ils génèrent ladite chaleur, il peut s’agir de moteurs combustibles (qui brûlent des trucs) ou non combustibles. Ils fonctionnent soit par la combustion directe d’un propergol, soit par la transformation d’un fluide pour générer du travail. En tant que tels, la plupart des moteurs thermiques présentent également des similitudes avec les systèmes de propulsion chimique. Ils peuvent être des moteurs à air (qui prennent un oxydant tel que l’oxygène dans l’atmosphère) ou des moteurs sans air (qui ont des oxydants liés chimiquement au carburant).
Moteurs à combustion interne
Les moteurs à combustion interne (moteurs IC) sont assez omniprésents aujourd’hui. Ils alimentent les voitures, les tondeuses à gazon, les hélicoptères, et ainsi de suite. Le plus gros moteur IC peut générer 109 000 CV pour alimenter un navire qui déplace 20 000 conteneurs. Les moteurs thermiques tirent leur énergie du carburant brûlé dans une zone spécialisée du système appelée chambre de combustion. Le processus de combustion génère des produits de réaction (gaz d’échappement) dont le volume total est beaucoup plus important que celui des réactifs combinés (carburant et comburant). Cette expansion est le véritable pain et le beurre des moteurs à combustion interne – c’est ce qui fournit réellement le mouvement. La chaleur n’est qu’un sous-produit de la combustion et représente une partie gaspillée du stock d’énergie du carburant, car elle ne fournit en fait aucun travail physique.
Crédits d’image NASA / Glenn Research Center.
Les moteurs à combustion interne se différencient par le nombre de « courses » ou de cycles que chaque piston effectue pour une rotation complète du vilebrequin. Les plus courants aujourd’hui sont les moteurs à quatre temps, qui décomposent la réaction de combustion en quatre étapes :
- Induction ou injection d’un mélange air-carburant (le carburateur) dans la chambre de combustion.
- Compression du mélange.
- Ignition par une bougie ou compression – le carburant fait boum.
- Émission de l’échappement.
Crédits image Duk / Wikimedia.
Pour chaque étape, un piston à 4 temps est alternativement poussé vers le bas ou vers le haut. L’allumage est la seule étape où du travail est généré dans le moteur, donc pour toutes les autres étapes, chaque piston compte sur l’énergie provenant de sources externes (les autres pistons, un démarreur électrique, un démarrage manuel ou l’inertie du vilebrequin) pour se déplacer. C’est pourquoi vous devez tirer la corde de votre tondeuse à gazon, et pourquoi votre voiture a besoin d’une batterie en état de marche pour démarrer.
Les autres critères de différenciation des moteurs thermiques sont le type de carburant utilisé, le nombre de cylindres, la cylindrée totale (volume interne des cylindres), la répartition des cylindres (moteurs en ligne, radiaux, en V, etc.), ainsi que la puissance et le rapport puissance/poids.
Moteurs à combustion externe
Les moteurs à combustion externe (moteurs EC)conservent séparément le carburant et les produits d’échappement – ils brûlent le carburant dans une chambre et chauffent le fluide de travail à l’intérieur du moteur par l’intermédiaire d’un échangeur de chaleur ou de la paroi du moteur. Ce grand daddy-o de la révolution industrielle, la machine à vapeur, entre dans cette catégorie.
À certains égards, les moteurs EC fonctionnent de manière similaire à leurs homologues IC – ils ont tous deux besoin de chaleur qui est obtenue en brûlant des choses. Il existe cependant aussi plusieurs différences.
Les moteurs EC utilisent des fluides qui subissent une dilatation-contraction thermique ou un changement de phase, mais dont la composition chimique reste inchangée. Le fluide utilisé peut être soit gazeux (comme dans le moteur Stirling), soit liquide (le moteur à cycle organique de Rankine), soit subir un changement de phase (comme dans le moteur à vapeur).Pour les moteurs thermiques, le fluide est presque universellement un mélange de combustible liquide et d’air qui brûle (change sa composition chimique). Enfin, les moteurs peuvent soit épuiser le fluide après utilisation comme le font les moteurs IC (moteurs à cycle ouvert), soit utiliser continuellement le même fluide (moteurs à cycle fermé).
Surprenant, les premiers moteurs à vapeur à voir une utilisation industrielle ont généré du travail en créant un vide plutôt qu’une pression. Appelées « moteurs atmosphériques », ces machines étaient lourdes et très peu consommatrices de carburant. Avec le temps, les moteurs à vapeur ont pris la forme et les caractéristiques que nous nous attendons à voir sur les moteurs d’aujourd’hui et sont devenus plus efficaces – avec les moteurs à vapeur alternatifs introduisant le système de piston (encore utilisé par les moteurs IC aujourd’hui) ou les systèmes de moteurs composés qui réutilisent le fluide dans les cylindres à des pressions décroissantes pour générer un « oomph » supplémentaire.
Aujourd’hui, les moteurs à vapeur sont tombés en désuétude : ce sont des choses lourdes et encombrantes, qui ont un rendement énergétique et un rapport puissance/poids bien plus faibles que les moteurs IC, et qui ne peuvent pas changer de puissance aussi rapidement. Mais si vous n’êtes pas gêné par leur poids et leur taille et que vous avez besoin d’un approvisionnement régulier en travail, elles sont géniales. En tant que tel, l’EC est actuellement employé avec beaucoup de succès comme moteurs à turbine à vapeur pour les opérations navales et les centrales électriques.
Les applications d’énergie nucléaire ont la particularité d’être appelées moteurs thermiques non-combustifs ou externes car ils fonctionnent sur les mêmes principes que les moteurs EC mais ne tirent pas leur puissance de la combustion.
Moteurs à réaction
Les moteurs à réaction, familièrement connus sous le nom de moteurs à réaction, génèrent une poussée en expulsant une masse réactionnelle. Le principe de base derrière un moteur à réaction est la troisième loi de Newton – en gros, si vous soufflez quelque chose avec suffisamment de force à travers l’extrémité arrière du moteur, cela poussera l’extrémité avant vers l’avant. Et les moteurs à réaction sont vraiment bons pour faire cela.
Crédits d’image thund3rbolt / Imgur.
Les choses que nous appelons habituellement un moteur « à réaction », ceux qui sont attachés à un avion de passagers Boeing, sont à proprement parler des moteurs à réaction à respiration aérienne et relèvent de la classe des moteurs à turbine. Les statoréacteurs, qui sont généralement considérés comme plus simples et plus fiables car ils contiennent moins de pièces mobiles (jusqu’à aucune), sont également des moteurs à réaction à air comprimé mais appartiennent à la classe des moteurs à statoréacteurs. La différence entre ces deux types de moteurs réside dans le fait que les statoréacteurs s’appuient sur la vitesse pure pour alimenter le moteur en air, alors que les turboréacteurs utilisent des turbines pour aspirer et comprimer l’air dans la chambre de combustion. Au-delà de cela, ils fonctionnent largement de la même manière.
Dans les turboréacteurs, l’air est aspiré dans la chambre du moteur et comprimé par une turbine en rotation. Les statoréacteurs l’aspirent et le compriment en allant très vite. A l’intérieur du moteur, il est mélangé à du carburant à haute puissance et enflammé. Lorsque vous concentrez de l’air (et donc de l’oxygène), que vous le mélangez à une grande quantité de carburant et que vous le faites exploser (générant ainsi des gaz d’échappement et une expansion thermique de tous les gaz), vous obtenez un produit réactionnel dont le volume est énorme par rapport à l’air aspiré. Le seul endroit où toute cette masse de gaz peut passer est à l’arrière du moteur, ce qu’elle fait avec une force extrême. En chemin, elle alimente la turbine, aspirant davantage d’air et entretenant la réaction. Et pour ajouter l’insulte à la blessure, à l’extrémité arrière du moteur, il y a une tuyère de propulsion.

Cette pièce de matériel force tous les gaz à passer dans un espace encore plus petit que celui par lequel ils sont entrés initialement – ce qui les accélère encore plus pour en faire « un jet » de matière. L’échappement sort du moteur à des vitesses incroyables, jusqu’à trois fois la vitesse du son, poussant l’avion vers l’avant.
Les moteurs à réaction non aérobies, ou moteurs-fusées, fonctionnent comme les moteurs à réaction sans la partie avant – car ils n’ont pas besoin de matière extérieure pour entretenir la combustion. Nous pouvons les utiliser dans l’espace car ils ont tout le comburant dont ils ont besoin, emballé dans le carburant. C’est l’un des rares types de moteurs à utiliser systématiquement des combustibles solides.
Les moteurs thermiques peuvent être ridiculement gros, ou adorablement petits. Mais que faire si tout ce que vous avez est une prise de courant, et que vous avez besoin d’alimenter vos affaires ? Eh bien, dans ce cas, vous avez besoin :
Des moteurs électriques
Ah oui, la bande propre. Il existe trois types de moteurs électriques classiques : magnétique, piézoélectrique et électrostatique.
Le magnétique, comme la batterie là, est le plus utilisé des trois. Il s’appuie sur l’interaction entre un champ magnétique et un flux électrique pour générer du travail. Il fonctionne sur le même principe qu’une dynamo pour générer de l’électricité, mais en sens inverse. En fait, vous pouvez générer un peu d’énergie électrique si vous faites tourner à la main un moteur électromagnétique.
Pour créer un moteur magnétique, vous avez besoin de quelques aimants et d’un conducteur enroulé. Lorsqu’un courant électrique est appliqué à l’enroulement, il induit un champ magnétique qui interagit avec l’aimant pour créer une rotation. Il est important de garder ces deux éléments séparés, c’est pourquoi les moteurs électriques ont deux composants principaux : le stator, qui est la partie extérieure du moteur et reste immobile, et un rotor qui tourne à l’intérieur. Les deux sont séparés par un entrefer. Habituellement, des aimants sont incorporés dans le stator et le conducteur est enroulé autour du rotor, mais les deux sont interchangeables. Les moteurs magnétiques sont également équipés d’un collecteur pour décaler le flux électrique et moduler le champ magnétique induit lorsque le rotor tourne afin de maintenir la rotation.
Les moteurs piézoélectriques sont des types de moteurs qui exploitent la propriété de certains matériaux de générer des vibrations ultrasoniques lorsqu’ils sont soumis à un flux d’électricité afin de créer du travail. Les moteurs électrostatiques utilisent des charges similaires pour se repousser mutuellement et générer une rotation dans le rotor. Comme le premier utilise des matériaux coûteux et que le second nécessite des tensions comparativement élevées pour fonctionner, ils ne sont pas aussi courants que les entraînements magnétiques.
Les moteurs électriques classiques ont une efficacité énergétique parmi les plus élevées de tous les moteurs existants, convertissant jusqu’à 90% de l’énergie en travail.
Entraînements ioniques
Les entraînements ioniques sont une sorte de mélange entre un moteur à réaction et un moteur électrostatique. Cette classe d’entraînements accélère les ions (plasma) en utilisant une charge électrique pour générer une propulsion. Ils ne fonctionnent pas s’il y a déjà des ions autour de l’engin, ils sont donc inutiles en dehors du vide spatial.
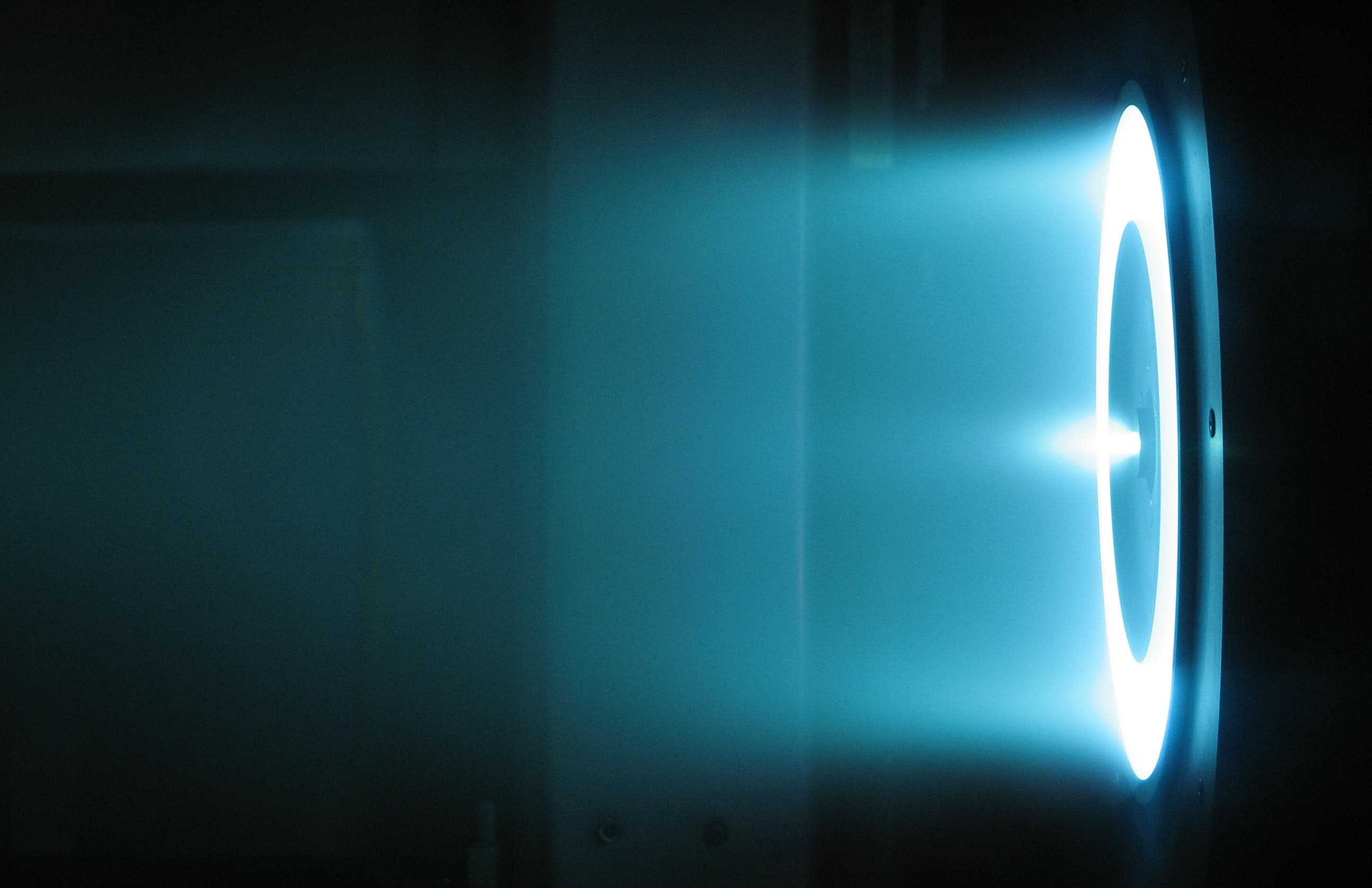
Crédits image NASA / JPL-Caltech.
Ils ont également une puissance de sortie très limitée. Cependant, comme ils n’utilisent que de l’électricité et des particules individuelles de gaz comme carburant, ils ont fait l’objet de nombreuses études pour être utilisés dans des vaisseaux spatiaux. Deep Space 1 et Dawn ont utilisé avec succès des moteurs ioniques. Malgré tout, cette technologie semble mieux adaptée aux petits vaisseaux et aux satellites puisque la traînée d’électrons laissée par ces entraînements a un impact négatif sur leurs performances globales.
Les entraînements EM/Cannae
Les entraînements EM/Cannae utilisent le rayonnement électromagnétique contenu dans une cavité micro-ondes pour générer de la confiance. C’est probablement le plus particulier parmi tous les types de moteurs. On l’a même appelé le moteur « impossible » puisqu’il s’agit d’un moteur non réactif – ce qui signifie qu’il ne produit aucune décharge pour générer la poussée, ce qui semble contourner la troisième loi.
« Au lieu de carburant, il utilise des micro-ondes qui rebondissent sur un ensemble de réflecteurs soigneusement réglés pour obtenir de petites quantités de force et donc obtenir une poussée sans propergol », a rapporté Andrei sur le moteur.
On a beaucoup débattu pour savoir si ce type de moteur fonctionne réellement ou non, mais les tests de la NASA ont confirmé son bon fonctionnement. Il est même prévu de le mettre à niveau dans le futur. Comme il n’utilise que de l’énergie électrique pour générer une poussée, bien qu’en quantités infimes, il semble être le moteur le mieux adapté à l’exploration spatiale.
Mais c’est dans le futur. Jetons un coup d’œil à la façon dont tout a commencé. Jetons un coup d’œil à :
Moteurs physiques
Ces moteurs reposent sur l’énergie mécanique stockée pour fonctionner. Les moteurs d’horlogerie, les moteurs pneumatiques et hydrauliques sont tous des moteurs physiques.
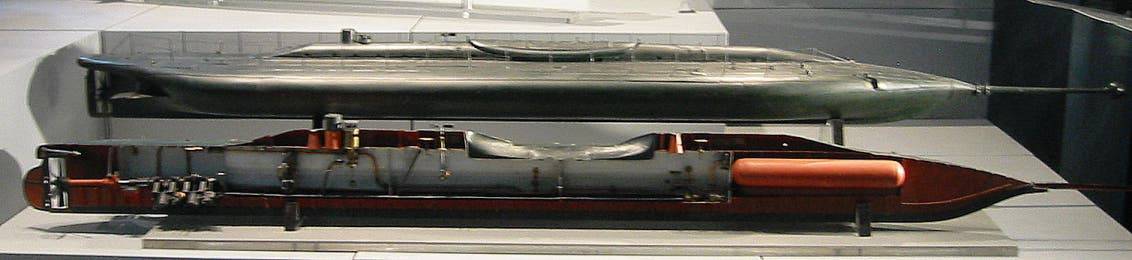
Crédit image Musée national de la Marine.
Ils ne sont pas terriblement efficaces. Ils ne peuvent généralement pas non plus faire appel à de grandes réserves d’énergie. Les moteurs à horloges par exemple stockent l’énergie élastique dans des ressorts, et doivent être remontés chaque jour. Les moteurs pneumatiques et hydrauliques doivent transporter de gros tubes de fluides comprimés, qui ne durent généralement pas très longtemps. Par exemple, le Plongeur, premier sous-marin à propulsion mécanique construit en France entre 1860 et 1863, était équipé d’un moteur pneumatique alternatif alimenté par 23 réservoirs à 12,5 bars. Ils occupaient un espace énorme (153 m³ / 5 403 pi³) et ne suffisaient qu’à propulser l’engin pendant 5 milles nautiques (9 km / 5,6 mi) à 4 nœuds.
Mais les moteurs physiques étaient probablement les premiers jamais utilisés. Les catapultes, les trébuchets ou les béliers reposent tous sur ce type de moteurs. Il en va de même pour les grues actionnées par l’homme ou la bête – toutes ont été utilisées bien avant tout autre type de moteurs.
Ce n’est en aucun cas une liste complète de tous les moteurs que l’homme a fabriqués. Sans compter que la biologie a aussi produit des moteurs – et ils sont parmi les plus efficaces que nous ayons jamais vus. Mais si vous lisez tout ceci, je suis sûr que le vôtre est à court de carburant à ce stade. Alors reposez-vous, détendez-vous, et la prochaine fois que vous rencontrerez un moteur, ayez les mains et le nez bien graissés pour l’explorer – nous vous avons dit les bases.